The Meter
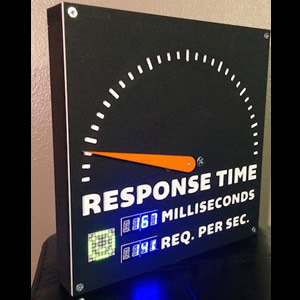
The whole idea of this project was to create a giant meter to show website response time almost like a speedometer would. The result is something that’s both fun to watch and provides a meaningful ‘heartbeat’ of current status. After several revisions and different designs along the way, I ended up with what you see here.
Construction & Design
The meter is carved using my CNC machine from 1/4” bi-color HDPE (12 inches square). This is a great material to cut signs or other carvings with because anything carved out is the alternate material color, so there’s no painting/masking/re-painting needed. The needle is cut from 1/8” orange acrylic which worked great for the speedometer theme. For mounting the micro servo, I designed a hole matching the shape of the outer plastic casing which the servo I chose had (see parts list for a link). I designed the whole thing using Inkscape and Easel, mainly because they are free and fairly easy to use. Check out my bill of materials if you are interested in using the same HDPE and acrylic.
View my design & bill of materials

Electronics
I decided to power the meter using the Arduino Uno microcontroller since it handles servo control really well. The Raspberry Pi would be another option, but I’ll detail the Arduino setup for now. My implementation also uses a few LED displays to display detailed metrics, but the servo is the main piece you need. Here’s a quick parts list:
- Arduino UNO
- micro servo motor
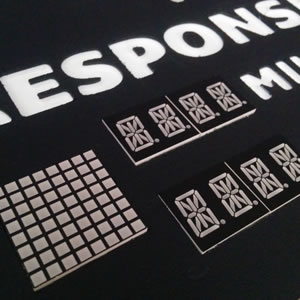
- 2x Adafruit Quad Alphanumeric Display - Blue 0.54” (optional)
- Adafruit Bicolor LED Square Pixel Matrix (optional)
- misc jumper wires
- screws, scrap wood for test cuts, etc.
Code
Construction was by far the longest part of this project. The code ended up being pretty simple since it’s just rotating a servo using a PWM output and writing values to LED displays over i2c. The nice thing is that the implementation can be changed to support any kind of metric or API that is desired. For example, instead of web response time you could make a meter for monitoring CPU utilization on a server or even your own desktop. I’ve posted all of the code required to get this working, along with more detail about the implementation on GitHub under servometer. Enjoy.